





APA
ISO 690-2
Harvard
Haga clic en un formato de citación
Prototype for Knee-load Relief through Ischiatic Support*
Prototipo para el alivio de carga en rodillas por medio de soporte isquiático
Ingeniería y Universidad, vol. 25, 2021
Pontificia Universidad Javeriana
Juan España-Aguilar a gyamhure@javeriana.edu.co
Pontificia Universidad Javeriana, Colombia
Alejandra Polanco-Aguilar
Pontificia Universidad Javeriana, Colombia
German Yamhure-Kattah
Pontificia Universidad Javeriana, Colombia
Received: 30 June 2019
Accepted: 29 July 2020
Abstract: Objective: The objective of this work was to develop a passive exoskeleton prototype for the relief of knee-load employing ischiatic body weight support. Methods and materials: A functional prototype was developed and tested with three volunteers to analyze its potential effectiveness and effects on gait kinematics. The performance of the prototype was assessed using motion capture and pressure mapping systems, and a testing bench for the study of ischiatic body weight. Results and discussion: The results of the tests indicate that the prototype allows reducing the load supported by the knees and does not have a significant effect on the kinematics of the hip and knee joints. The process allowed the designers to identify possibilities of improvement mainly on reducing the restrictions imposed by the prototype to the motion of the ankles, especially on the midstance of the support phase. Conclusions: The passive exoskeleton prototype developed for ischiatic body weight support allows setting different percentages of knee-load relief. The prototype does not have a significant effect on the kinematics of the hip and knee joints. Nevertheless, improvements must be performed to reduce the restrictions to the motion of the ankles.
Keywords:Arthrosis, exoskeleton, knee-load relief.
Resumen: Objetivo: el objetivo de este trabajo fue desarrollar un prototipo de exoesqueleto pasivo para el alivio de carga en la rodilla utilizando soporte isquiático del peso. Métodos y materiales: un prototipo funcional fue desarrollado y probado con tres voluntarios para analizar su posible efectividad y efectos en la cinemática de la marcha. El desempeño del prototipo se evaluó utilizando sistemas de captura de movimiento y de mapeo de presión, y un banco de pruebas para el estudio del soporte de peso corporal isquiático. Resultados y discusión: los resultados de las pruebas indican que el prototipo permite reducir la carga soportada por las rodillas sin un efecto significativo en la cinemática de las articulaciones de la cadera y la rodilla. El proceso permitió a los diseñadores identificar posibilidades de mejora principalmente en cuanto a la reducción de las restricciones impuestas por el prototipo al movimiento de los tobillos, especialmente en la mitad de la fase de apoyo. Conclusiones: el prototipo de exoesqueleto pasivo desarrollado para el soporte isquiático del peso permite definir configurar diferentes porcentajes de alivio de carga en la rodilla. El prototipo no tiene un efecto significativo sobre la cinemática de las articulaciones de la cadera y rodilla. Sin embargo, se deben realizar mejoras para reducir las restricciones sobre el movimiento de los tobillos.
Palabras clave: artrosis, exoesqueleto, alivio de carga en rodillas.
Introduction
One of the most common chronic rheumatic diseases is Arthrosis. Given its symptoms and prevalence, it considered an important public health problem [1], [2]. Arthrosis is characterized by being painful and limiting the joint movement, leading to disability conditions. It is estimated that more than 80 % of the people older than 55 suffer from radiological osteoarthritis, and approximately between 10 % to 20 % of the adult population suffers from this disease [1]. Among the joints, the knee joint is one of the areas most affected by this condition with a prevalence of 41 % [3].
Among the non-pharmacological treatments, the main indications are centered on avoiding trauma and overloads on the affected joints [4]. To this end, different walking assistance devices have been designed for joint relief aiming at reducing the forces and moments generated in the hip, knee and ankle joints. The solutions range from simple and economic devices like canes, crutches, and pans to more complex orthotic devices as exoskeletons. The exoskeletons are classified as passive if all the forces are applied by the user [5], or active if actuators are included in the system to supply energy [6], [7].
This work presents the development of a passive exoskeleton prototype for the relief of knee-load by means of ischiatic body weight support. The design process is based on the use of inverse dynamics to compute the load to be relieved. The process design and manufacture of a prototype for one user are presented. An analysis of the effectiveness of the prototype designed and the effects of its use on gait kinematics during preliminary tests are exposed. The tests were performed with three healthy adult men of similar anthropometric characteristics as an early validation of the design process and the prototype.
It is worth highlighting that the impact of this study can be extended to other areas of rehabilitation and prevention of joint wear. For example, this type of solution is of interest on ergonomics for labors in which a person stands for long periods of time or carries and shifts weight. Another example is the development of crutches to decrease the load on bones and joints.
Materials and Methods
This section is organized as follows: First, the considerations performed to define the requirements of design are presented. Then, the process of design and prototype manufactured are described. Finally, the methodology used for evaluating the use of the prototype through preliminary tests is presented.
Definition of Design Requirements
The main objective of walking assistance devices is performing load transfer to relieve the load on specific joints. For this reason, the most important parameter for the design of these devices is the load to transfer, that is, the relief force. Considering that when walking the weight of the person is supported by one leg and then the other, the weight that each leg supports is not constant across the stride. On the contrary, the instantaneous force depends on the pattern of movement and characteristics of the body. For this reason, inverse dynamics were used to calculate the relief force for each stride cycle considering it as a percentage of total body weight. Inverse dynamics consist of predicting the external forces that are necessary to generate a given motion. This means, that from information of the kinematics of the musculoskeletal system (e.g., motion expressed as joint angles along time), and considering the anthropometric characteristics of the user, as the length and mass of body segments, it is possible to estimate the external forces that are applied on the body, as floor reaction force. From further analysis, if the external forces are known, it is possible to estimate internal forces acting on joints and segments, such as the moment in the knee.
The inverse dynamics of the gait was performed through computational simulations from a musculoskeletal model for gait analysis. The 3DGaitModel2392 gait model available in the open-source software OpenSim was used [8]. The software allows modeling musculoskeletal structures including joints, rigid bodies, muscles, and actuators, among others. Additionally, an analytical model from the linkages and joints of the legs was implemented to verify the results of the computational simulations. The analytical model was implemented with the Newton-Euler algorithm of inverse dynamics. This model, expressed on the sagittal plane, considers three degrees of freedom corresponding to the thigh, calf, and foot rotation, and an external force representing the reaction force due to the contact with the floor for each leg.
Measurements of the gait kinematics and kinetics of the user for which the prototype is designed (male, healthy, age: 26 years, mass: 80 kg, height: 1.78 m) were performed to estimate the internal forces on the knee through the two approaches.
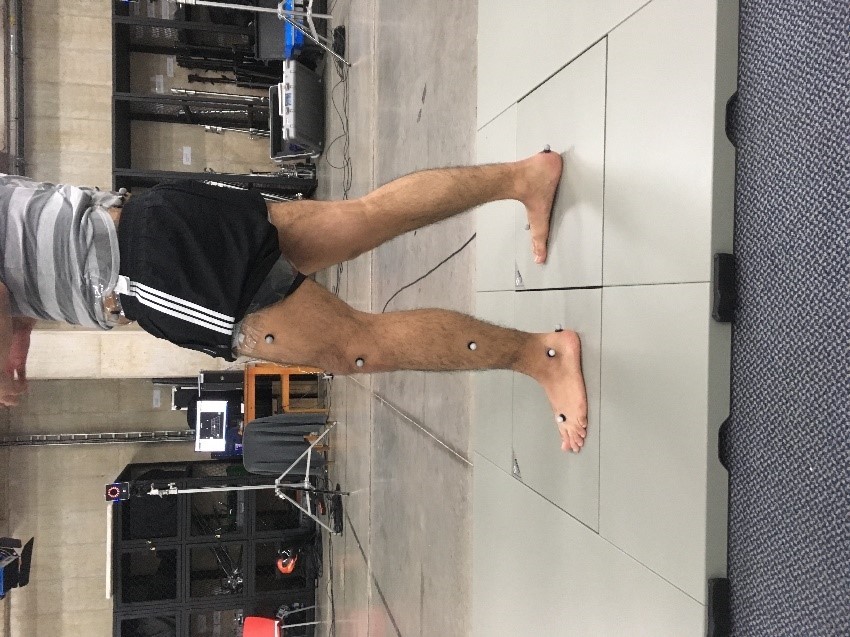
The kinematics of the user was registered with an optical motion capture system (Vicon system with 8 cameras Vantage V5 and 4 cameras T 10-S). A total of 16 passive reflective markers were located in lower limbs to register the trajectory of the hip, knee and ankle joints. The user was instructed to walk as usual inside the test area for 5 minutes. The external force measured was the reaction force on the contact between each foot and the floor. For this, an AccuGait-Optimized force measurement platform was used. The user was asked to walk as usual along the test path 20 times. Figure 1 presents the set-up for the measurement.
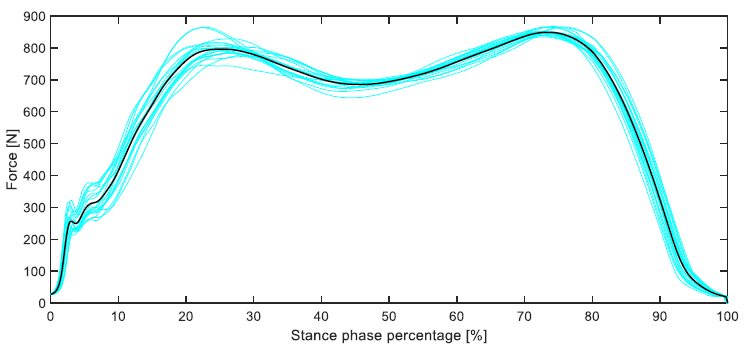
The data of the repetitions were normalized over time, as the walking speed is variable, and averaged obtaining the floor reaction force curve for the stance phase of the gait cycle as shown in figure 2.
The anthropometric profile of the user was performed by measuring 20 parameters describing the geometry of lower limbs and total body mass according to the protocol presented in [9]. The mass properties of the body segments were estimated by approximating the geometry of each segment to geometric figures (e.g., cylinders for thigh and calf segments, and pyramids for foot segments) as presented in [10]. The anthropometric characteristics of the user are presented in table 1 as the average of left and right segments.

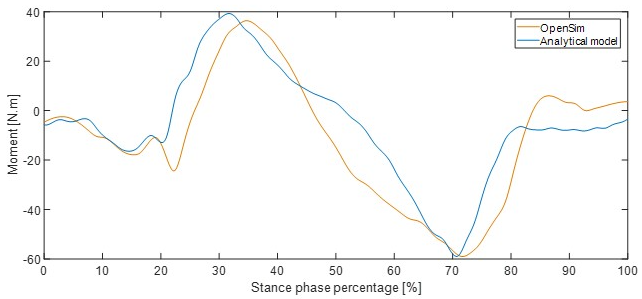
Using the data acquired for the kinematics, kinetics and mass properties, the moments in the knee joints were estimated with both models. The results are presented in figure 3. The agreement between the predictions of the two models, estimated with Pearson coefficient, is 0.9843. Indicating that the results obtained in the models are consistent.
The IBWS allows the user to walk while exerting a defined external force in the ischium. A system of plantar pressure measurement (Novel PedarTM system) was used to measure the external force applied from the floor to the feet for a given relieve force. Four relief forces were tested in the range from 5 % to 20 % of relief respect to the forces of normal gait. Figure 5 presents the floor reaction forces (measured in the interphase between the foot and the shoe), measured with the plantar pressure system, for different relief forces.
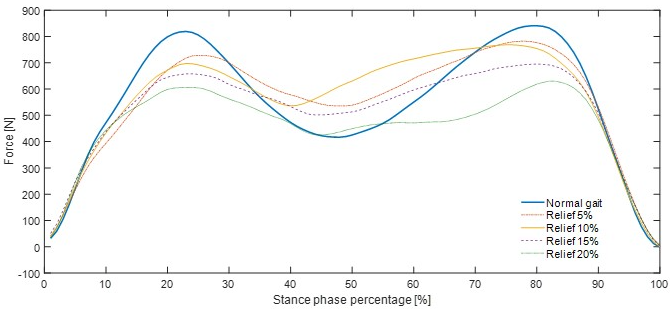
Figure 6 presents an example of the comparison of the ischiatic vertical force measured by the IBWS system and predicted by the computational model, for the 20 % relief scenario.
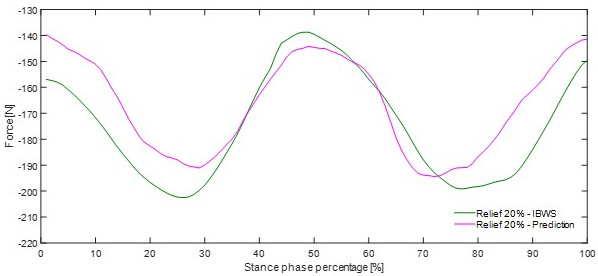
It can be observed that there is a grade of agreement between the computational model and the force measured. It can also be observed that there is an underestimation of the forces when predicted with the computational model, up to 5.5 % for the case presented. This indicates that the computational model information can be used considering that the forces are underestimated.
For the design of the prototype, other design parameters were defined considering mainly its interaction with the user. First, the system should not affect the kinematics of the user with respect to normal gait. For this, it was considered that the prototype should be light, mass under 8 kg, and passive or quasi-passive. Second, the system should be accessible. For this, it should be of easy maintenance and made of accessible materials and accessories. Third, the system should have modifiable relief load with a capacity of up to 20 %. Finally, the system is designed for a user with symmetrical gait, and the motion in the sagittal plane is considered.
The following engineering specifications were defined for the user for which the prototype was designed: Anthropometric characteristics of lower limbs, range of motion of leg joints, load transferred to the ischium and the mass of the exoskeleton. The prototype, like many prostheses and orthoses must be adjusted to the user’s anthropometry. The prototype reported in this document was designed for an anthropometry of males with a mass around 80 kg and a height around 1.8 m. The design of a prototype for women required including additional considerations, particularly for the straps that lie between the legs due to specific anatomical characteristics [12].
Development of the Prototype
Considering the design parameters and requirements, an exoskeleton of the legs was designed to transmit the relief force from the floor to the ischium. Figure 7 presents a scheme of the mechanism.

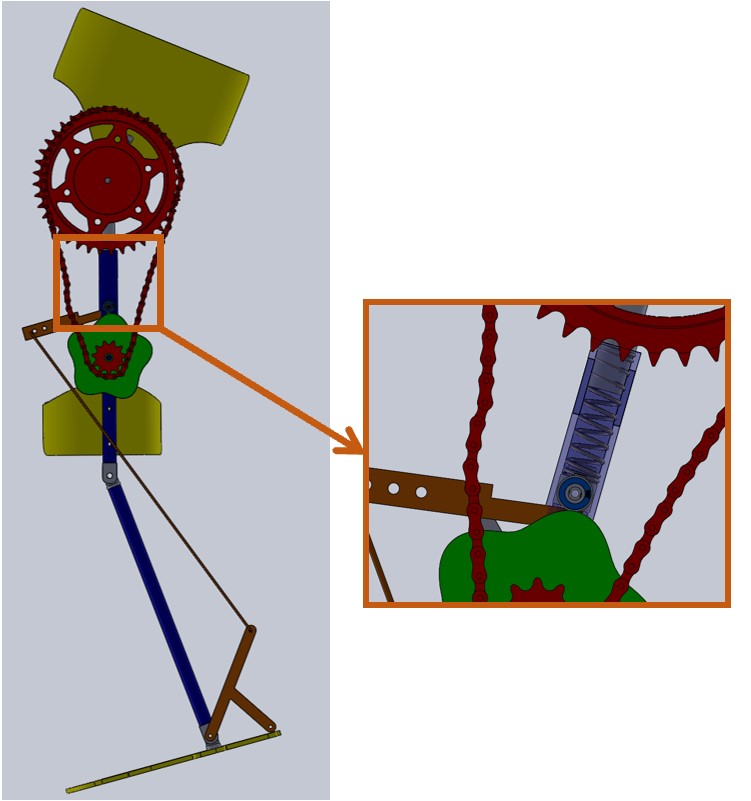
The system starts working at the beginning of the gait cycle, on the initial contact, when the heel enters in contact with the floor. The force is applied by two mechanisms working simultaneously. On one side, one of the mechanisms uses the flexion of the hip joint movement to rotate the chainrings. The small chainring is attached to the cam moving it along the cycle. The follower of the cam changes the length of a spring used to modify the force transmitted to the ischium. The cam was designed to perform the higher compression of the spring, and hence the maximum transmission of force, during the floor reaction force peaks in initial and final simple support phases. The gear ratio obtained from the difference of radius between small and big chainrings allows scaling the range of motion of the hip to the rotation of the cam required to synchronize with the gait cycle. A ratchet located between the big chainring and the hip support allows chainring movement only during the contact stance phase, while the leg is returning to the front, there is no relative motion of the chainrings. For this reason, there is no force transmission during the swing phase. On the other side, the artificial tendons use the moment of the ankle to transmit force to the cam follower. This mechanism works due to the movement to a linkage fixed to the foot relative to the calf segment and a linkage than transmits the force to the cam follower. The magnitude of the relief force is modified by the change in length of the spring as shown in figure 8.
Prototype manufactured is presented in figure 9. where can be observed system is fixed to the user by supports located on the lower part of the abdomen, above the knee, and under the foot. The force is transmitted to the ischium by means of a suspension system.

Validation/Test Methodology
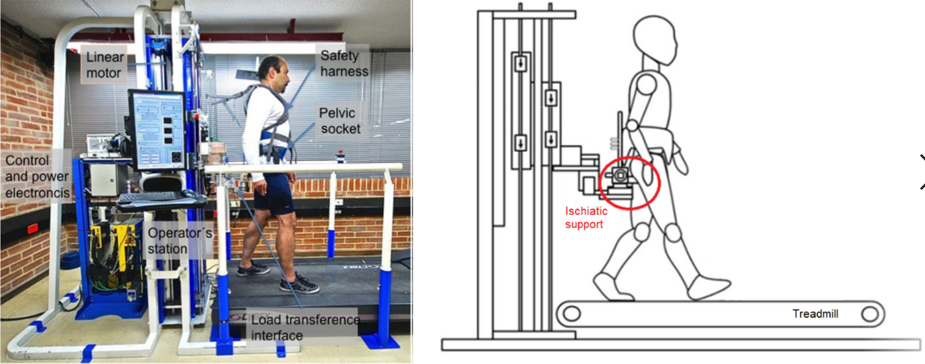
To analyze the effect of the use of the exoskeleton on the user, pilot tests were performed with the prototype. Three healthy men voluntarily participated in the tests after signing an informed consent form. All the volunteers had similar anthropometric characteristics (age: 26.5 ± 0.7 years, mass: 74.3 ± 6.0 kg, height: 1.74 ± 0.08 m). The kinematics of the users were acquired with the same motion capture system used for the preliminary tests registering the angle of the ankle, knee, and hip. Kinetics data were acquired with the same system of plantar pressure measurement used in the preliminary tests registering the external force applied in the feet. Figure 10 presents the set-up used for the tests.

The tests were performed for normal gait without using the exoskeleton, and then using the exoskeleton configured for a force relief of 10 %, 15 %, and 20 %. The volunteers were asked to walk 20 steps with each leg for each testing condition. The data of the steps was normalized over time and averaged.
Results and Analysis
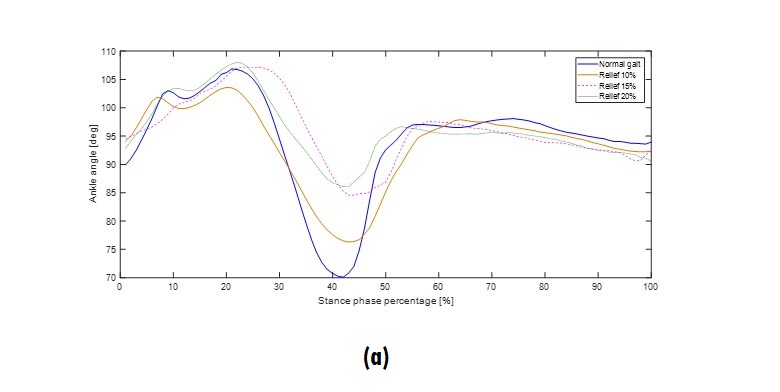
Regarding the kinematics, figure 11 presents examples of the angles registered for ankle, knee and hip joints across the stance phase. The figure presents the kinematics data for one volunteer with and without the exoskeleton.
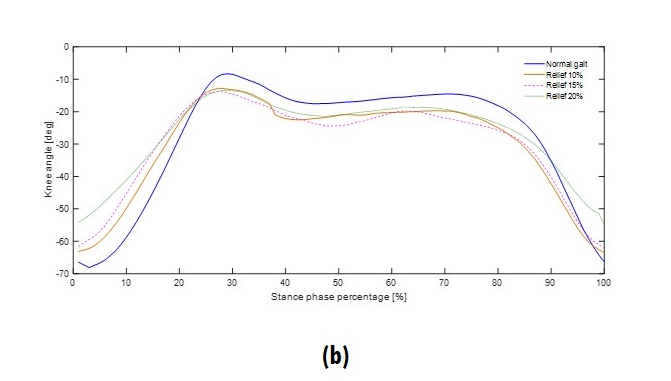

The difference between the angles measured with the exoskeleton for each relief force and without the exoskeleton (i.e., normal gait) was computed. The difference was computed as the average of the rms of the error between each couple of vectors; this value was normalized respect to the range of each angle. The results are presented in table 2.
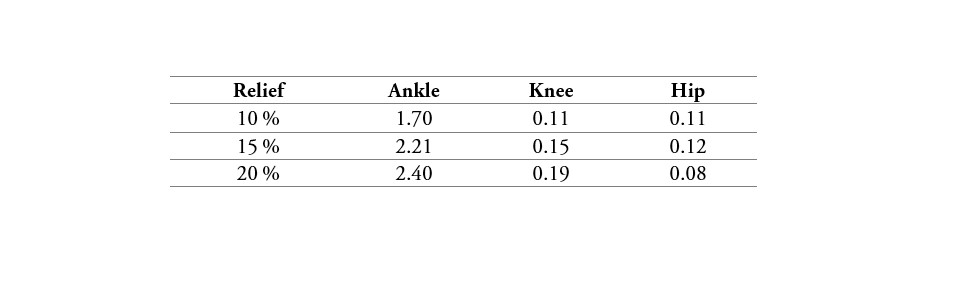
In Figure 11 it can be observed that the use of the exoskeleton has an effect on the kinematics of the user. For this volunteer, the use of the exoskeleton presented a higher effect on the ankle motion around 40 % of the stance phase. The effect was increased at higher relief forces. This difference is more notorious around the midstance of the support phase. A paired t-tests was performed with a 5 % significance level, the results show a statistical difference for the ankle angle and no statistical difference for the knee and hip angles. It can also be observed in the results the agreement between the kinematics with and without the exoskeleton is better for lower relief forces for ankle and knee joints.
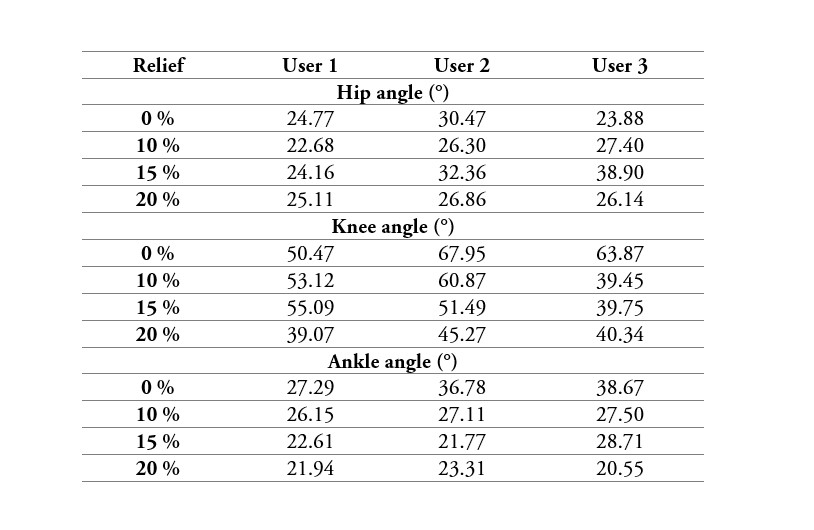
An analysis was performed for the range of motion registered for joints of the three volunteers (table 3). It can be observed that for two users the ranges of motion of the hip and knee decrease when using the exoskeleton.
Regarding the kinetics, figure 12 presents an example of the force in the shoe-foot interphase for one volunteer with and without the exoskeleton. The Pearson coefficient for each relief force respect to the normal gait was computed. The results were 0.947, 0.938, and 0.9132 for 10 %, 15 %, and 20 % relief force, respectively.
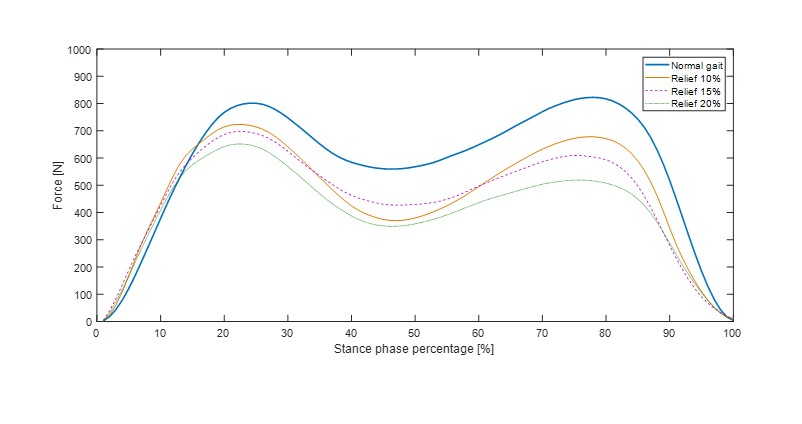
It can be observed that the pattern of the load is conserved across the gait cycle, and the magnitude of the forces transmitted to the feet decreases as the relief percentage increases, as expected.
Conclusions
The design, manufacture and preliminary test of a prototype for the relief of knee-load by means of ischiatic body weight support was performed. The design was made starting from the inverse dynamics of the gait of a subject. The results of the tests performed with three healthy volunteers using the prototype indicate that the prototype allows reducing the load supported by the knees. The system designed allows setting different percentages of load relief. The system does not have a significant effect on the kinematics of the hip and knee joints. Nevertheless, the system should be improved to reduce the restriction to the motion of the ankles, especially on the midstance of the support phase. The results of the experiments in healthy people are promising, indicating that, after validating the prototype with a larger number of healthy volunteers, a future phase of the project could consider performing the tests with volunteers with knee osteoarthritis.
References
[1] M. Comas, M. Sala, R. Román, L. Hoffmeister, and X. Castells, “Variaciones en la estimación de la prevalencia de artrosis de rodilla según los criterios diagnósticos utilizados en los estudios poblacionales,” Gaceta Sanitaria, vol. 24, no. 1, pp. 28–32, 2010. Available: https://doi.org/10.1016/j.gaceta.2009.06.002
[2] A. Litwic, M. H. Edwards, E. M. Dennison, and C. Cooper, “Epidemiology and burden of osteoarthritis,” Br. Med. Bull., vol. 105, no. 1, pp. 185–199, 2013. doi: 10.1093/bmb/lds038
[3] P. Rosenthal, “Knee osteoarthritis,” in Insall & Scott Surgery of the Knee, 5th ed. Philadelphia: Elsevier, 2012, pp. 718–722.
[4] F. Rannou and S. Poiraudeau, “Non-pharmacological approaches for the treatment of osteoarthritis,” Best Pract. Res. Clin. Rheumatol., vol. 24, no. 1, pp. 93–106, 2010. doi: 10.1016/j.berh.2009.08.013
[5] M. Wiggin, S. H. Collins, and G. S. Sawicki, “A passive elastic ankle exoskeleton using controlled energy storage and release to reduce the metabolic cost of walking,” in Proc. 7th Annu. Dyn. Walking Conf., 2012, pp. 24–25. Available: https://static1.squarespace.com/static/508aeee9e4b0660daf192355/t/588bbf9fa5790a5bdd28e7ae/1485553568383/Wiggin.pdf
[6] Y. Ikeuchi, J. Ashihara, Y. Hiki, H. Kudoh, and T. Noda, “Walking assist device with bodyweight support system,” in 2009 IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2009, pp. 4073–4079. Available: https://ieeexplore.ieee.org/document/5354543
[7] C. A. McGibbon, S. C. E. Brandon, M. Brookshaw, and A. Sexton, “Effects of an over-ground exoskeleton on external knee moments during stance phase of gait in healthy adults,” Knee,vol. 24, no. 5, pp. 977–993, 2017. doi: 10.1016/j.knee.2017.04.004
[8] U. K. Trinler, “Muscle force estimation in clinical gait analysis,” Ph.D. dissertation, University of Salford, 2016. Available: http://usir.salford.ac.uk/id/eprint/39257/
[9] K. Norton, N. Whittingham, L. Carter, D. Kerr, C. Gore, and M. Marfell-Jones, “Técnicas de medición en antropometría,” in Antropométrica, K. Norton K and T. Olds, Eds. Editorial: ciudad, 2000, pp. 23–60. https://www.researchgate.net/publication/283664365_Antropometrica_Spanish_version_of_Anthropometrica_Norton_K_and_T_Olds_1995
[10] C. L. Vaughan, B. L. Davis, and C. Jeremy, Dynamics of human gait, Editorial: ciudad, 1999. http://analisedemarcha.com/papers/livro/GaitBook.pdf
[11] A. Salguero-Beltrán, G. Yamhure, M. Manrique, L. C. Jiménez, A. Hernández, and C. Cotrino, “On the design of an ischiatic body weight support system (IBWS) for gait rehabilitation,” in 2012 4th IEEE RAS EMBS Int. Conf. Biomed. Robot. Biomechatron. BioRob, 2012, pp. 1434–1439. doi: 10.1109/BioRob.2012.6290940
[12] I. Frobose, L. Baeyens, and K. Tofaute, “Ergonomics of 2 bicycle saddles-pressure at the pudendal area in women of a normal saddle with gel and of a saddle with a hole,” The Bicycle Saddle Report, vol. 2003, pp. A1–15, 2003. https://www.sq-lab.com/out/pictures/ddmedia/Study_Froboese-Baeyens_2003-03.pdf
Notes
*
Research article
Author notes
a Corresponding author. E-mail: gyamhure@javeriana.edu.co
Additional information
How to cite this article: J. España-Aguilar, A. Polanco-Aguilar, and G. Yamhure-Kattah, “Prototype for knee-load relief through ischiatic support,” Ing. Univ., vol. 25, 2021 [Online]. https://doi.org/10.11144/Javeriana.iued25.pkrt
